Report Size Marker¶
Get and record the size of a size marker or set an area as a size marker.
plantcv.report_size_marker_area(img, roi, marker='define', objcolor='dark', thresh_channel=None, thresh=None, label=None)
returns analysis_image
- Parameters:
- img = An RGB or grayscale image to plot the marker object on
- roi = A region of interest (e.g. output from pcv.roi.rectangle or other methods)
- marker = 'define' (default) or 'detect'. If 'define' it means you set an area, if 'detect' it means you want to detect within an area
- objcolor = Object color is 'dark' (default) or 'light' (is the marker darker or lighter than the background)
- thresh_channel = 'h', 's', or 'v' for hue, saturation or value, default set to None
- thresh = Binary threshold value (integer), default set to None.
- label = Optional label parameter, modifies the variable name of observations recorded. (default =
pcv.params.sample_label)
- Context:
- Allows user to add size marker data, so that shape data can be normalized between images/cameras
- Output data stored: Data ('marker_area', 'marker_ellipse_major_axis', 'marker_ellipse_minor_axis', 'marker_ellipse_eccentricity')
automatically gets stored to the
Outputsclass when this function is ran. These data can always get accessed during a workflow (example below). Summary of Output Observations
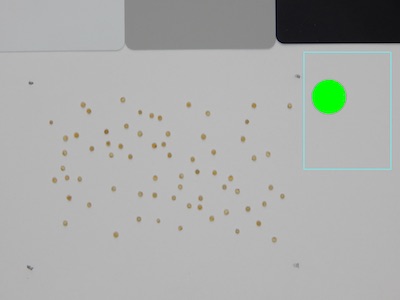
Object (green) that is identified as partially inside ROI

from plantcv import plantcv as pcv
# Set global debug behavior to None (default), "print" (to file),
# or "plot" (Jupyter Notebooks or X11)
pcv.params.debug = "plot"
# Optionally, set a sample label name
pcv.params.sample_label = "marker"
# Define an ROI for the marker
roi = pcv.roi.rectangle(img=img1, x=3550, y=850, h=500, w=500)
# Detect and Measure Size Marker
image = pcv.report_size_marker_area(img=img1, roi=roi, marker='detect',
objcolor='light', thresh_channel='s',
thresh=120)
# Access data stored out from report_size_marker_area
marker_area = pcv.outputs.observations['marker']['marker_area']['value']
Area selected to detect size markers

Object (green) that is identified as size marker
Source Code: Here