Watershed Segmentation¶
This function is based on code contributed by Suxing Liu, Arkansas State University. For more information see https://github.com/lsx1980/Leaf_count. This function uses the watershed algorithm to detect boundary of objects. Needs a mask file which specifies area which is object is white, and background is black.
plantcv.watershed_segmentation(rgb_img, mask, distance=10, label=None)
returns analysis_image
- Parameters:
- rgb_img - RGB image data
- mask - Binary image, single channel, object in white and background black
- distance - Minimum distance of local maximum, lower values are more sensitive, and segments more objects (default: 10)
- label - Optional label parameter, modifies the variable name of observations recorded. (default =
pcv.params.sample_label)
- Context:
- Used to segment image into parts
- Data automatically gets stored into the Outputs class. Users can look at the data collected at any point during the workflow by using pcv.outputs.save_results which saves all stored data to a .json file.
- Output data stored: Data ('estimated_object_count') automatically gets stored to the
Outputsclass when this function is ran. These data can always get accessed during a workflow (example below). For more detail about data output see Summary of Output Observations
Original image
from plantcv import plantcv as pcv
# Set global debug behavior to None (default), "print" (to file), or "plot" (Jupyter Notebooks or X11)
pcv.params.debug = "plot"
# Optionally, set a sample label name
pcv.params.sample_label = "plant"
# Segment image with watershed function
analysis_image = pcv.watershed_segmentation(rgb_img=crop_img, mask=bin_mask, distance=10)
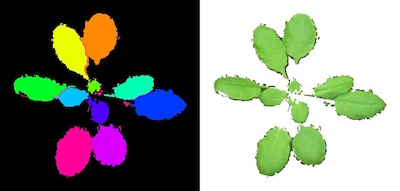
Watershed Segmentation
Source Code: Here