Threshold Two Channels¶
Creates a binary image from an RGB image based on the pixels values in two channels. The x and y channels define a 2D plane and the two input points define a straight line. Pixels in the plane above and below the straight line are assigned two different values.
plantcv.threshold.dual_channels(rgb_img, x_channel, y_channel, points, above=True)
returns thresholded/binary image
-
Parameters:
- rgb_img - RGB image
- x_channel - Channel to use for the horizontal coordinate. Options: 'R', 'G', 'B', 'l', 'a', 'b', 'h', 's', 'v', 'gray', and 'index'
- y_channel - Channel to use for the vertical coordinate. Options: 'R', 'G', 'B', 'l', 'a', 'b', 'h', 's', 'v', 'gray', and 'index'
- points - List containing two points as tuples defining the segmenting straight line
- above - Whether the pixels above the line are given the value of 0 or 255
-
Context:
- Used to help differentiate plant and background
- Example use:
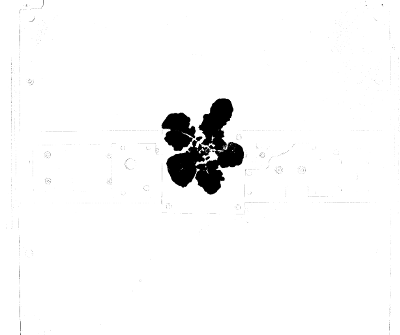
Original image

from plantcv import plantcv as pcv
# Set global debug behavior to None (default), "print" (to file),
# or "plot" (Jupyter Notebooks or X11)
pcv.params.debug = "plot"
# Points previously defined
pts = [(159, 128), (132, 110)]
# Create binary image from a RGB image based on two color channels and a straight
# line defined by two points
mask = pcv.threshold.dual_channels(rgb_img=img, x_channel='b', y_channel='a', points=pts, above=True)
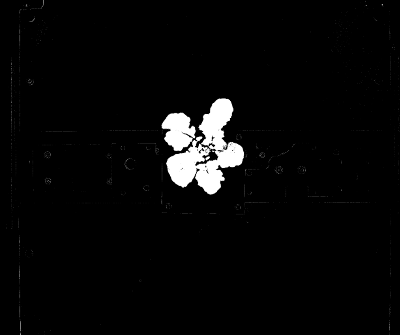
Thresholded image
# Create binary image from a RGB image based on two color channels and a straight
# line defined by two points
mask = pcv.threshold.threshold_2_channels(rgb_img=img, x_channel='b', y_channel='a', points=pts, above=False)
Thresholded image (inverse)
Source Code: Here