Camera calibration¶
This function uses the outputs of plantcv.transform.checkerboard_calib to correct distortions introduced by the camera.
plantcv.transform.calibrate_camera(rgb_img, mtx, dist)
returns corrected image
-
Parameters:
- rgb_img - an RGB image to be corrected
- mtx_filename - path to a .npz file output from plantcv.checkerboard_calib
- dist_filename - path to a .npz file output from plantcv.checkerboard_calib
-
Context:
- Used to correct image distortions based on checkerboard calibrations
-
Example use:
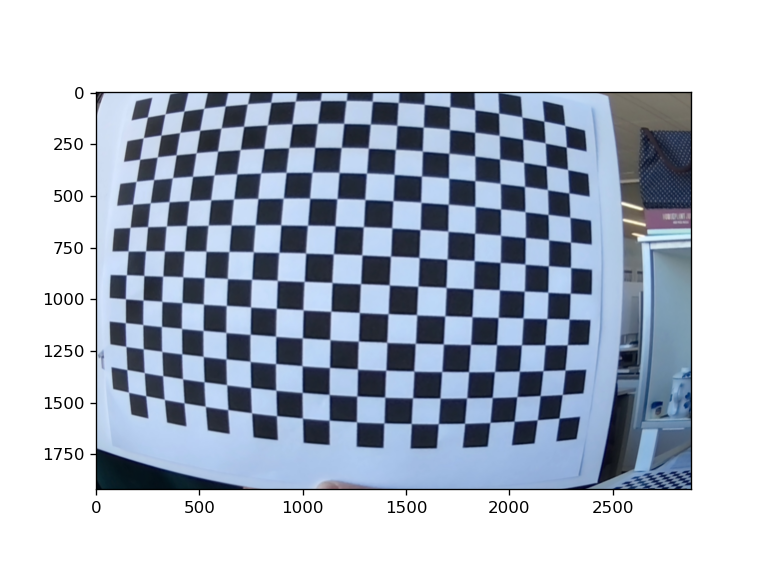
Checkerboard image example
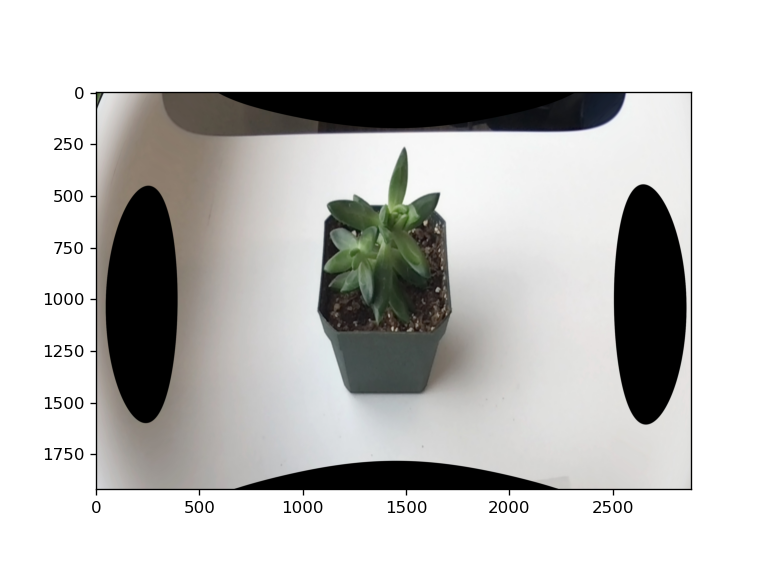
Input image example

from plantcv import plantcv as pcv
# Set global debug behavior to None (default), "print" (to file), or "plot" (Jupyter Notebooks or X11)
pcv.params.debug = "plot"
# Create calibration matrices with checkerboard images
mtx, dist = pcv.transform.checkerboard_calib(img_path = "./img_files/", col_corners = 13, row_corners = 19, out_dir = "./output/")
# Correct distortions using the outputs from checkerboard calibration
corrected_img = pcv.transform.calibrate_camera(rgb_img = img, mtx_filename = "./output/mtx.npz", dist_filename = "./output/dist.npz")
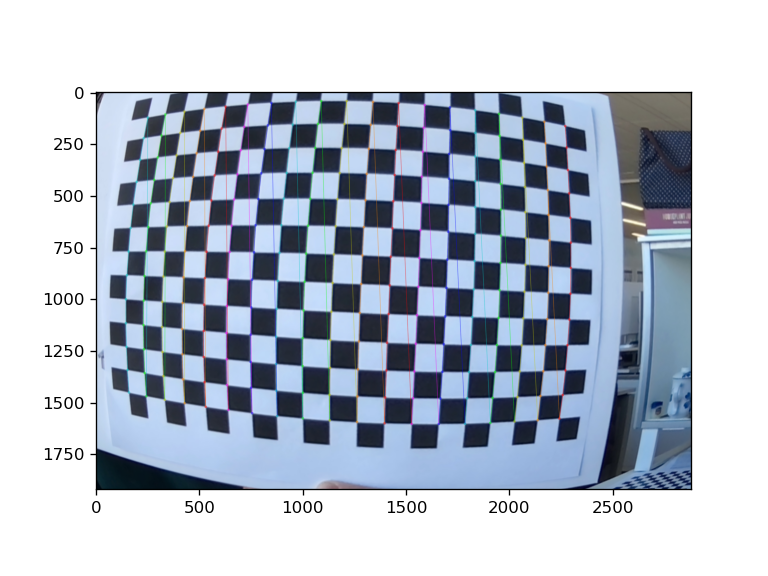
Checkerboard calibration
Corrected image
Source Code: Here